News & Updates
Latest press releases, announcements, and industry insights from SiteSee.
SiteSee and Albireo AI Partner to Accelerate Telecom Site Monetisation
SiteSee and Albireo AI announce a strategic partnership combining NexDT's decision-ready digital twin platform with Albireo's telecom-specific AI to help asset owners make faster colocation, upgrade and monetisation decisions across the US and LATAM markets.
May 4, 2026
SiteSee at ConnectX: From Digitisation to Monetisation
At the SiteSee Spotlight Stage at Connect (X): Powered by WIA, industry leaders from Fortysouth New Zealand and Symphony Towers Infrastructure shared how NexDT has transformed colocation decisions — cutting months-long processes to 15 minutes.
May 2026
Ed Knapp Joins SiteSee as Strategic Advisor
We're excited to welcome Ed Knapp as a Strategic Advisor to SiteSee. Ed brings a rare mix of operator, technology, innovation, and growth experience from American Tower and Qualcomm.
April 23, 2026
Rooftop RF Exposure & EME Assessment in Minutes, Not Months
With SiteSee NexDT, operators can run rooftop RF exposure / EMF / EME plume assessments in minutes. Proven results: 196 days faster revenue, 80% First Time Right.
April 16, 2026
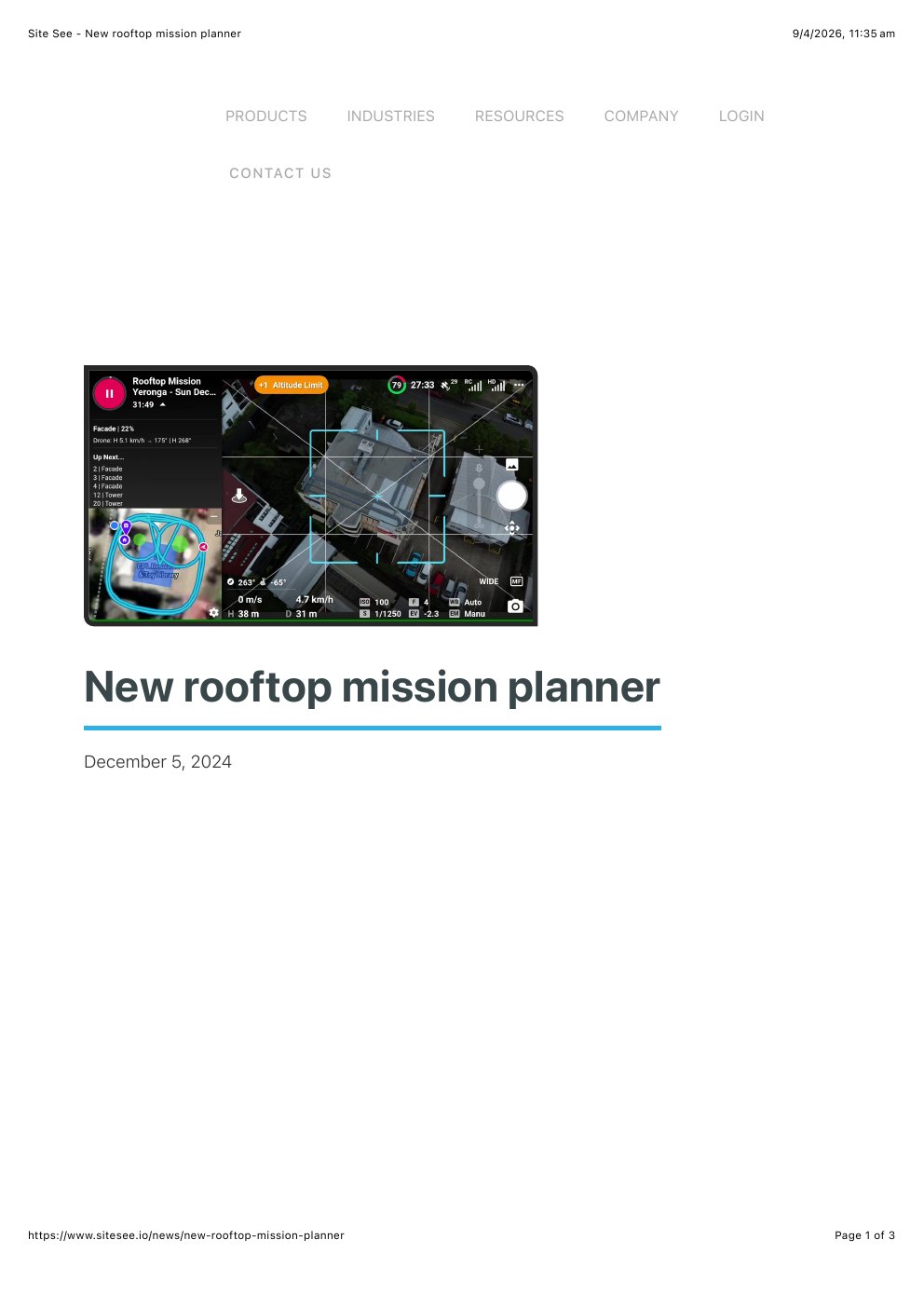
New Rooftop Mission Planner
Rooftop digital twins are an important telco infrastructure asset. Learn how SiteSee's new rooftop mission planner helps teams capture and manage rooftop sites.
December 5, 2024

ISO27001 Continuation of Certification
We are excited to announce that SiteSee has successfully maintained our ISO 27001 Data Security Certification.
September 2, 2024
PRESS RELEASE: SiteSee Pty Ltd Achieves ISO/IEC 27001:2022 Data Security Certification
SiteSee proudly announces its recent ISO/IEC 27001:2022 Data Security Certification.
November 1, 2023
PRESS RELEASE: SiteSee partners with the INS Group in the UK
The INS Group and SiteSee have partnered to bring innovative wireless telecom asset management solutions to the UK and EU.
March 23, 2023

PRESS RELEASE: SiteSee partners with LeBLANC to create a fully digitised infrastructure portfolio for Lumea
SiteSee partners with LeBLANC to fully digitise Lumea infrastructure.
March 9, 2022

PRESS RELEASE: SiteSee partners with Neptuno as they launch their 3D digital twin transformation journey for their USA customers
SiteSee partners with Neptuno as they launch their 3D digital twin transformation journey for their USA customers.
December 10, 2021

PRESS RELEASE: SiteSee partners with OCK Group as their 3D digital twin transformation journey begins in Malaysia and Indonesia
SiteSee is partnering with their Channel Partner OCK Group to create a fully digitised cell tower portfolio.
November 17, 2021

AI Boost for Digital Twin
See how SiteSee is applying AI to improve Digital Twin. AIBoost prevents need for recapture.
October 13, 2021

AI Boost for 3D Reconstruction
See how SiteSee is applying AI to improve 3D model reconstruction. AIBoost prevents need for recapture.
June 30, 2021
UK Telecoms Companies Embrace Digital Transformation Using SiteSee
UK telecoms companies are embracing digital transformation using SiteSee's AI-powered digital twin platform.
2022
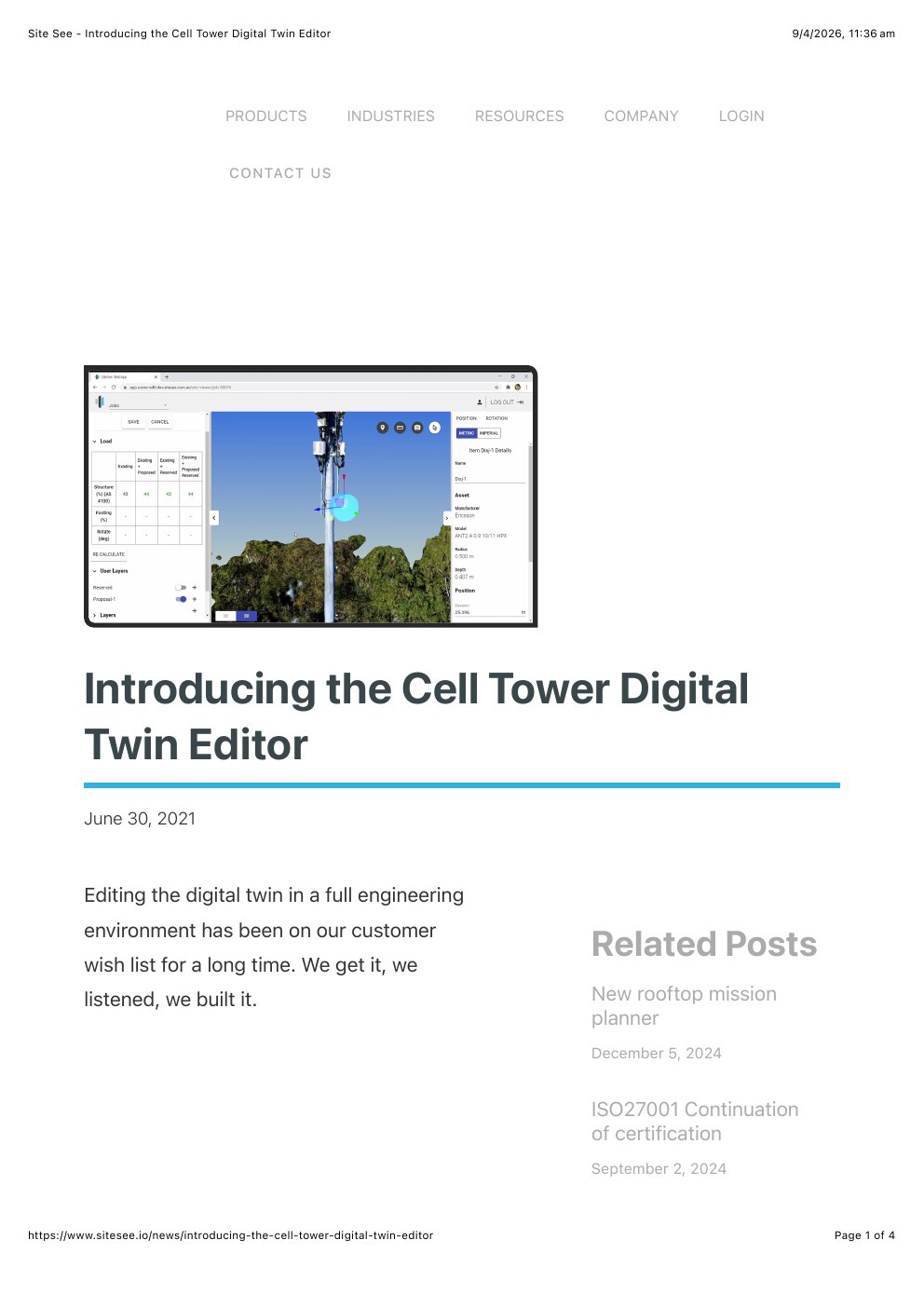
Introducing the Cell Tower Digital Twin Editor
Full edit capability to design new upgrades to cell sites with full engineering load prediction.
June 30, 2021
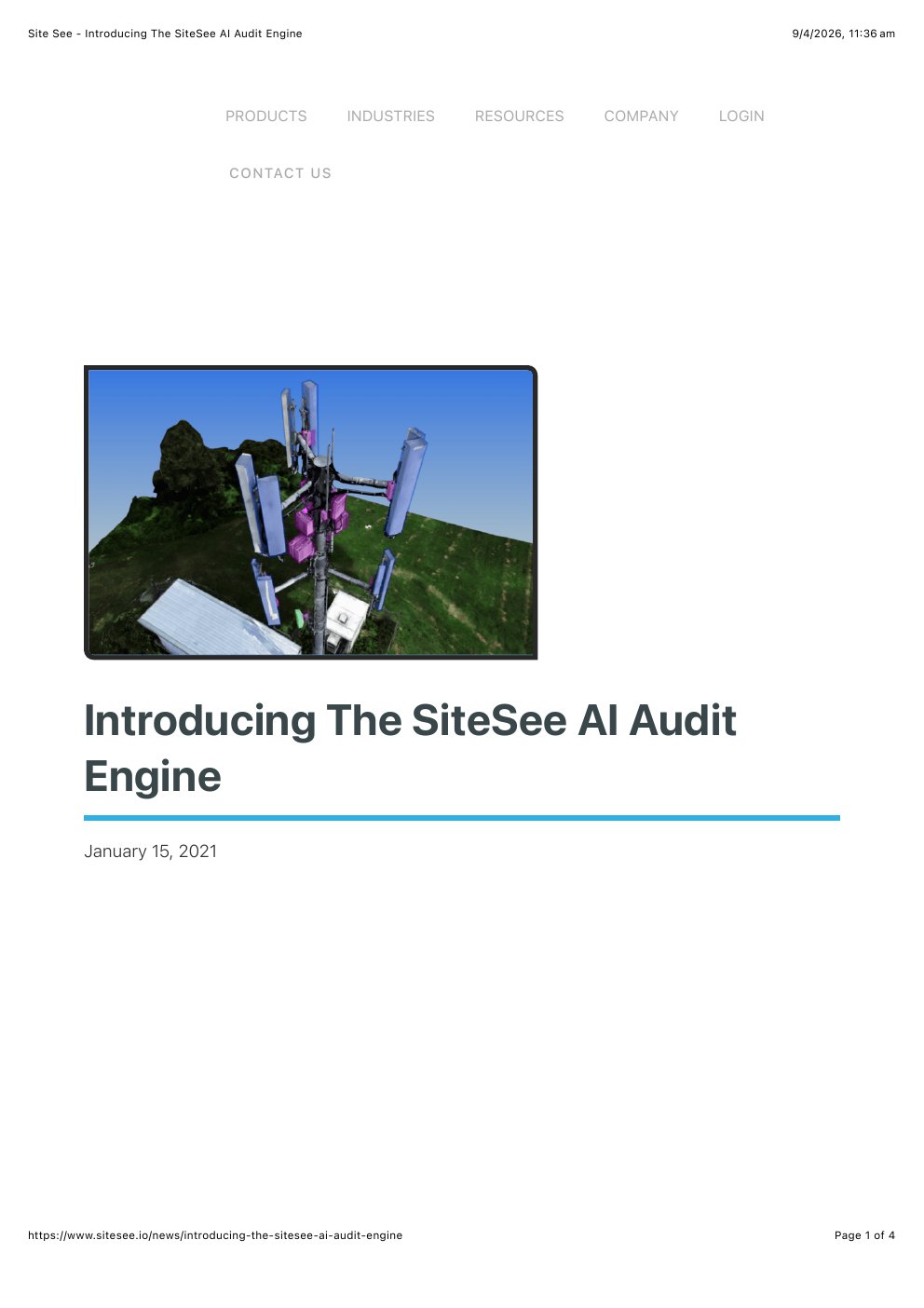
Introducing The SiteSee AI Audit Engine
The SiteSee AI Audit Engine combines Reality Modelling, Machine Learning and Computational Geometry to audit tower infrastructure without climbing.
January 15, 2021
AI For Infrastructure Information Night
How is AI making an impact for infrastructure owners and operators? Hear from four leaders in AI.
January 16, 2021
GCP vs No GCP
Comparison of photogrammetry model reconstruction using GCP vs NoGCP — accuracy, scale and orientation results.
2021
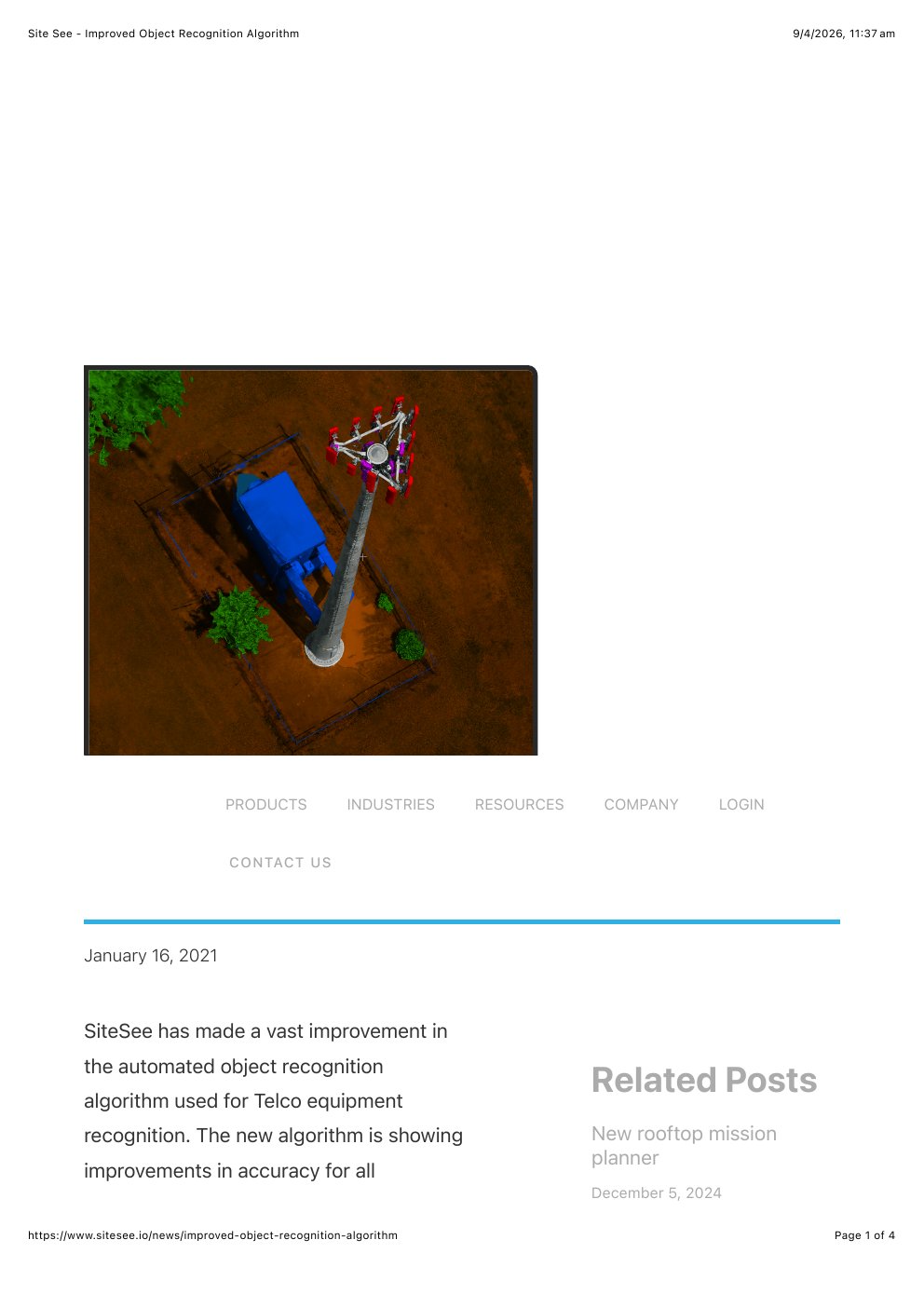
Improved Object Recognition Algorithm
SiteSee has made a vast improvement in the automated object recognition algorithm used for Telco equipment recognition.
January 16, 2021
SiteSee Finalist For YII 2018
SiteSee has been nominated as a finalist for the Bentley Year In Infrastructure 2018 awards.
January 12, 2021

2018 AI Technology Highlights
Highlights of SiteSee's 2018 AI technology delivery including multiple Telco equipment recognition and advanced shape fitting.
January 12, 2021
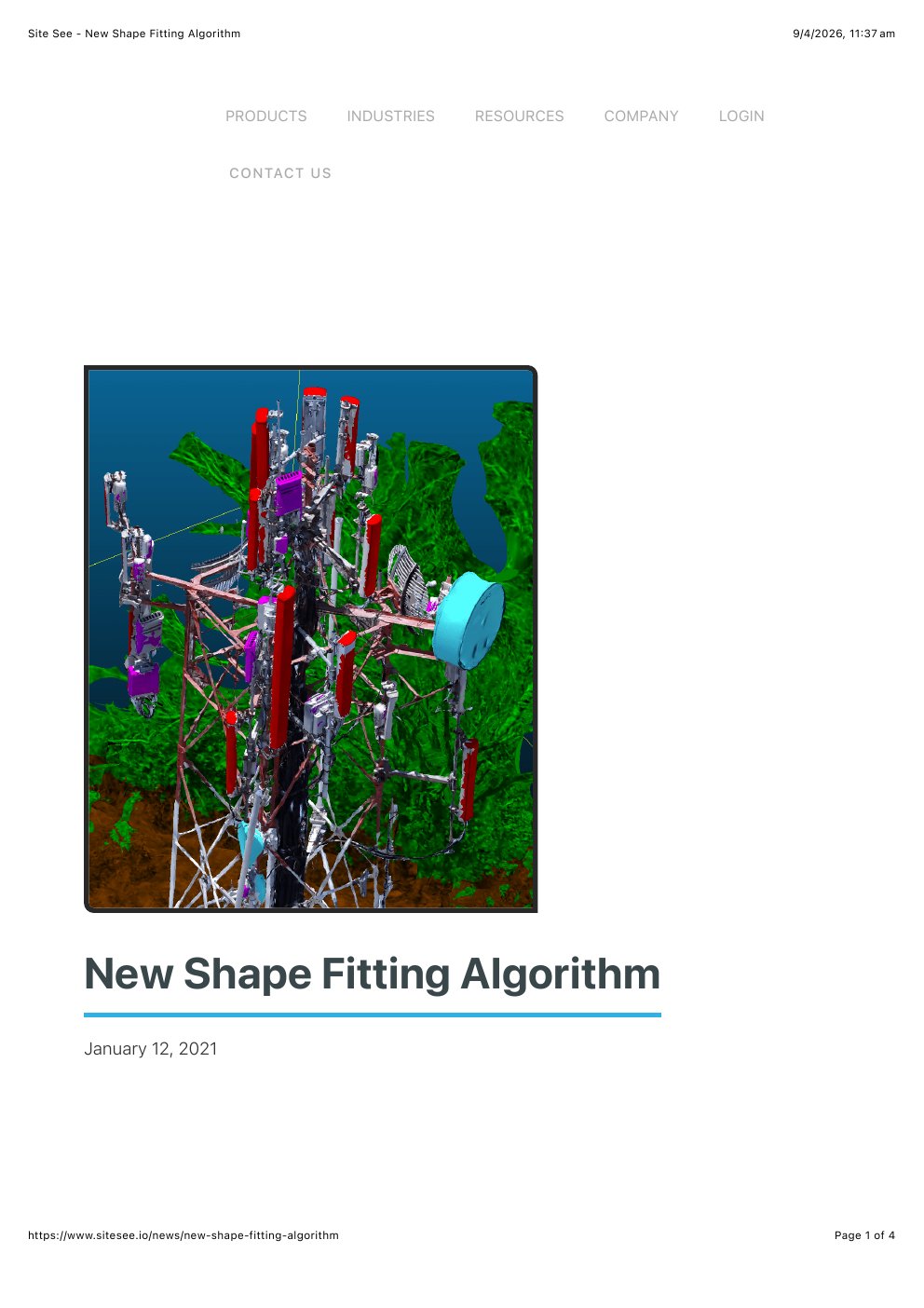
New Shape Fitting Algorithm
SiteSee's new Shape Fitting algorithm improves equipment detection accuracy and 3D model quality.
2020
SiteSee Information Night
Join us for an information night on SiteSee's latest innovations in tower infrastructure management.
2021
Year In Infrastructure
A look back at the year in infrastructure and SiteSee's contributions to the industry.
2021
Simplifying Site Share
How SiteSee is simplifying the site sharing process for tower companies.
2021
EME Simulation
SiteSee's EME simulation capabilities for tower infrastructure management.
2021
TowerXchange
SiteSee at TowerXchange — showcasing the latest in tower infrastructure digital twin technology.
2021
US Telecom Council
SiteSee at the US Telecom Council — digital twin technology for the US market.
2021
Tower Intelligence
SiteSee's Tower Intelligence platform for smarter tower management.
2021
Stay updated
Subscribe to our newsletter to receive the latest news, product announcements, and industry insights.